




为庆祝中国共产党建党100周年及中国自动化学会六十华诞,中国自动化学会面向世界科技前沿、面向经济主战场、面向国家重大需求、面向人民生命健康,把握大势、抢占先机,设立中国自动化学会青年菁英系列活动(CAA Youth e-Summit,简称CAA YeS)。
由中国自动化学会主办,湖南大学机器人视觉感知与控制技术国家工程研究中心、岳麓山工业创新中心(潇湘实验室)、湖南大学电气与信息工程学院承办的“中国自动化学会青年菁英论坛:机器人与智能系统”于2023年4月16日在湖南大学线下召开,并取得圆满成功。本期Yes通过CAA会议小程序、CAA官方视频号、bilibili官方账号、学会微博官方账号、知乎全程直播,4.6万人次观看直播。
中国工程院院士、中国自动化学会常务理事、机器人视觉感知与控制技术国家工程研究中心主任王耀南担任论坛名誉主席,湖南大学张小刚教授、刘敏教授、张辉教授担任论坛主席,湖南大学电气与信息工程学院冯运副教授、缪志强副教授担任论坛组织主席。本次论坛有幸邀请到12位来自国内知名高校及企业的优秀科技工作者作主题报告,共同研讨机器人技术和智能系统理论与应用等方面所面临的机遇及挑战。
论坛参与人员合影
论坛名誉主席王耀南院士在致辞中表示,机器人和智能系统作为新兴科技技术在陆、海、空、天等多个领域都得到了广泛的应用, 技术核心涵盖感知、决策、控制和优化等技术。希望本次论坛能够促进机器人与自动化等领域的学术交流与合作。

湖南大学王耀南院士致辞
论坛首先由南方科技大学长聘教授林志赟带来题为“多机器人协同定位理论与方法”的报告。报告围绕多机器人协同定位问题,提出基于图Laplacian的线性方法,系统地探索信息交互满足何种网络拓扑使得多机器人协同定位可求解的根本性问题,然后探讨如何设计分布式算法实现可定位、不可定位机器人的判断,最后介绍能够实现全局收敛性的多机器人分布式协同定位算法。
南方科技大学林志赟教授作报告
第二位报告人是来自华中科技大学的伍冬睿教授,报告题目为“脑机接口中的机器学习”。报告首先介绍了脑机接口的定义与个性化校准需求,然后介绍了报告人围绕脑机接口校准开展的先进机器学习方法研究,最后介绍了脑机接口系统的安全性和隐私保护方面的研究工作。

华中科技大学伍冬睿教授作报告
第三位报告人是来自浙江工业大学的张文安教授,报告题目为“ 复杂测量环境下的多源信息融合估计”。报告针对多源超高清、超高速数据和跨网络深度融合需求,介绍了报告人针对感知信息存在高维、特征复杂以及难以预知的不确定性等新特征开展的研究工作及应用。

浙江工业大学张文安教授作报告
第四位报告人是北京航空航天大学的文力教授,报告题目是“ 软体机器人的仿生物理智能”。报告介绍章鱼触手仿生软体机器人与连续体软体机械臂项目,通过介绍其仿生机理、软体机器人样机、柔性传感及柔性控制电路等,阐述如何逐步实现形态学智能的软体机器人发展到自主与可交互的智能软体机器人。
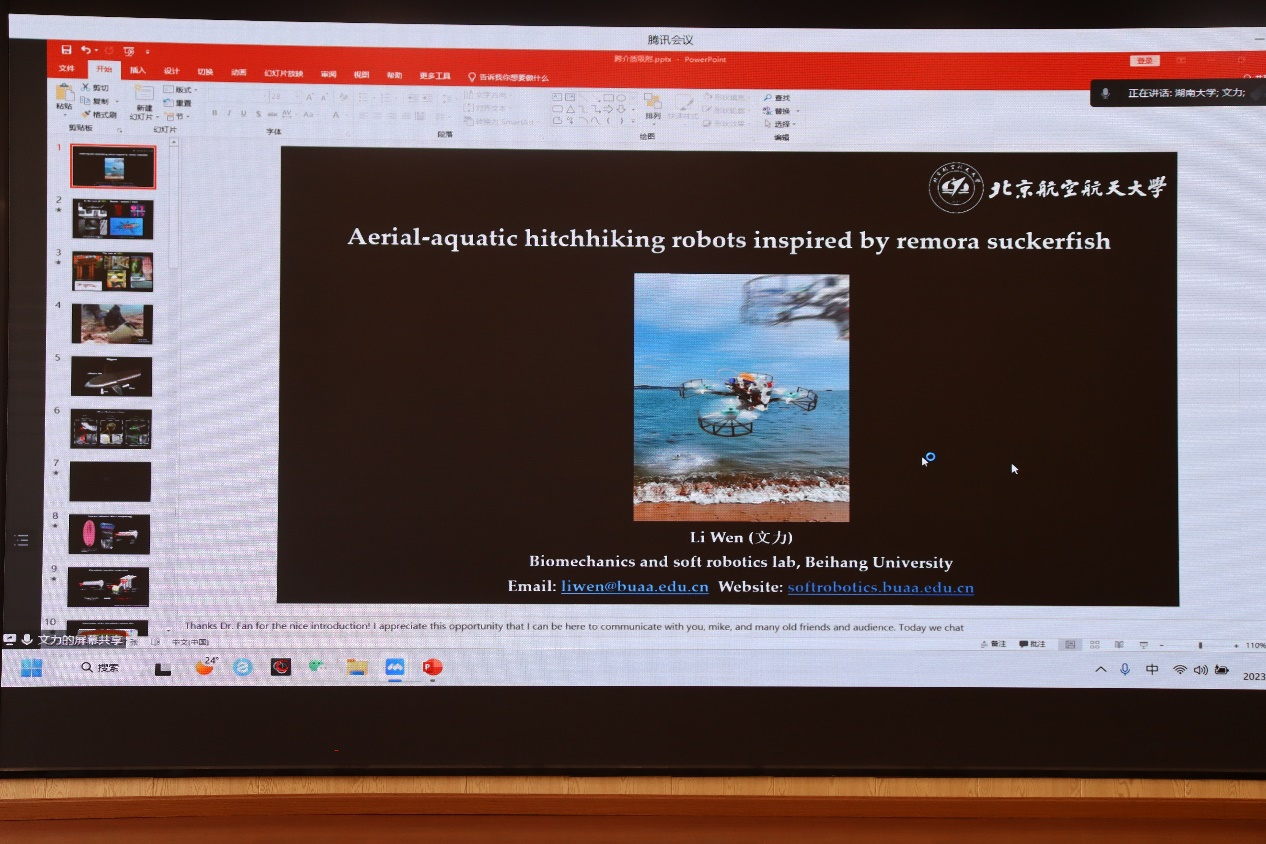
北京航空航天大学文力教授作报告
第五位报告人是华南理工大学的张智军教授,报告题目为“ 变参递归神经网络及其在智能机器人中的应用”。报告介绍了张教授设计并提出的变参递归神经网络,从理论上证明了该网络在求解时变问题及机器人运动规划问题时具有超指数收敛的性质。并进一步介绍了在机器人运动规划、自然人机交互及飞行控制器设计等方面的应用。

华南理工大学张智军教授作报告
第六位报告人是合肥工业大学的都海波教授,报告题目为“非光滑控制理论及其在多自主移动机器人中应用”,报告主要介绍如何把采样控制理论思想和非光滑控制理论有机融合起来,提出了适合离散非光滑控制系统分析和设计的相关一些工具,从而解决了离散非光滑控制中的部分理论问题,最后介绍了在非光滑/有限时间控制理论在多移动机器人应用方面取得的一些应用成果。

合肥工业大学都海波教授作报告
第七位报告人是西北工业大学的袁源教授,报告题目为“ 无人系统博弈优化控制:理论与应用”。报告具体介绍了课题组在极端环境中无人系统博弈优化控制策略设计与系统分析方面的研究成果。主要包括多源干扰、非合作机动和拒止攻击下的博弈规划与控制方法,旨在解决无人系统博弈优化控制系统面临的“难抗扰”、“难量化”、“难耦合”的难题。

西北工业大学袁源教授作报告
第八位报告人是北京理工大学的王钢教授,报告题目为“ 网络化系统数据驱动控制”。报告主要针对网络传输通道中存在的噪声、网络攻击、有限传输带宽等问题,利用离线收集的数据,通过设计直接数据驱动控制器,实现对模型未知系统的弹性控制以及鲁棒状态估计。

北京理工大学王钢教授作报告
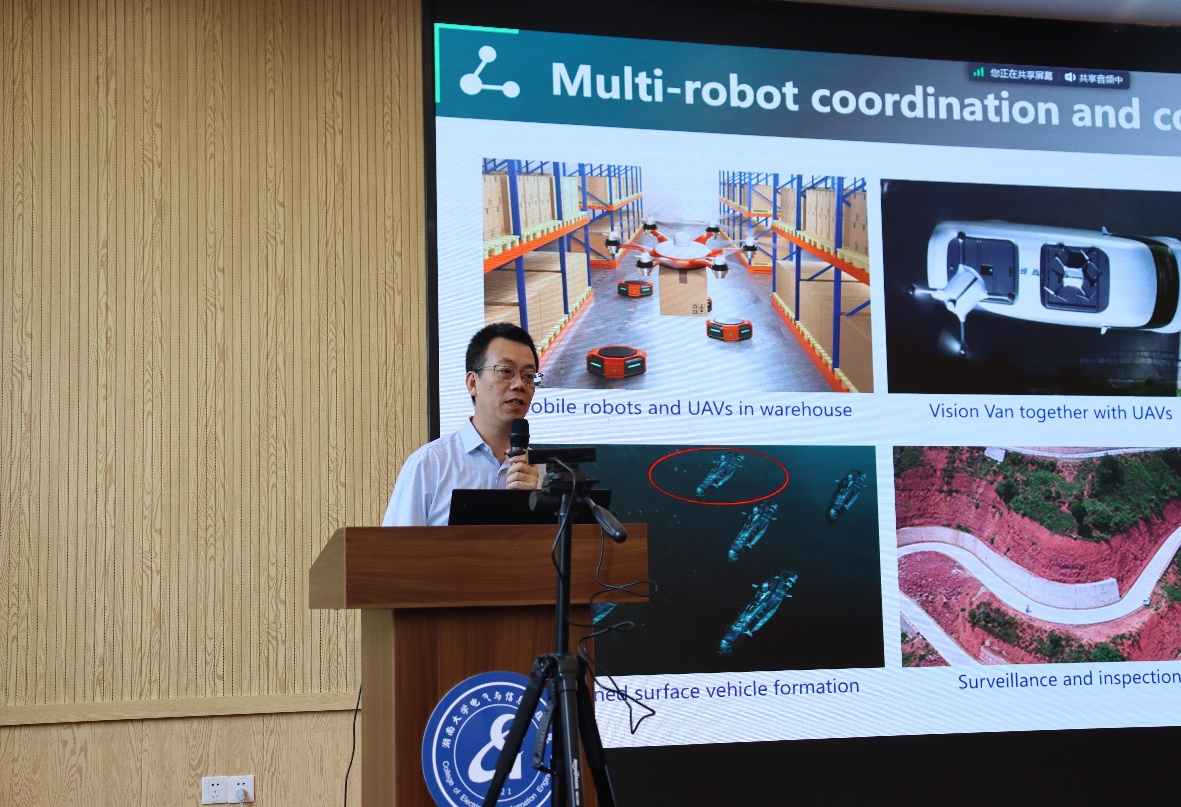
第九位报告人是浙江大学董山玲研究员,报告题目为“ 多智能体系统的协同控制研究”。报告针对网络环境下普遍存在的系统参数变化、非线性、通信受限等问题,介绍近几年关于网络化多智能体系统的协同控制研究工作。

浙江大学董山玲研究员作报告
第十位报告人是浙江大学陆豪健研究员,报告题目为“ 面向医疗应用的微型软体机器人”。报告主要介绍面向体内复杂环境的微型多足机器人设计与运动控制、微型机器人无线传感与通讯集成设计、基于生物信息学的微型机器人搭载药物挖掘及筛选,旨在解决微型医疗机器人多功能集成、高效可控运动、智能化医疗问题,推进微型医疗机器人在临床上应用。
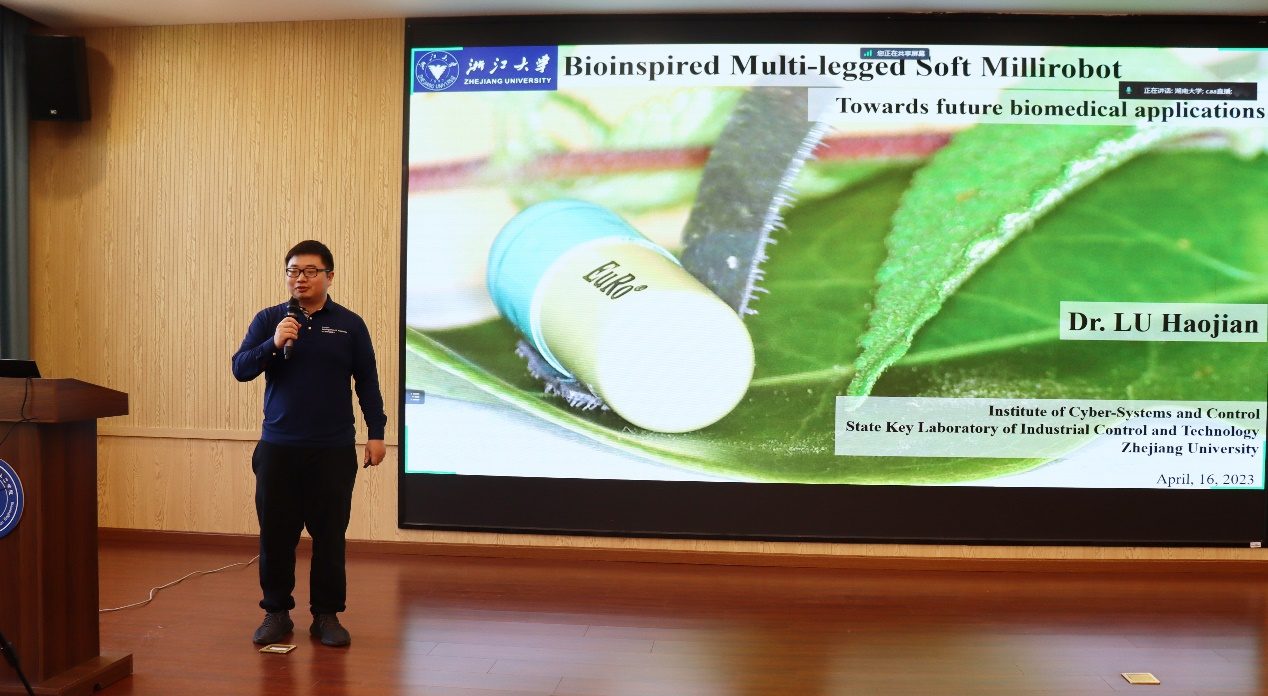
浙江大学陆豪健研究员作报告
第十一位报告人是上海交通大学方崇荣助理教授,报告题目为“Secure Cyber-Physical Systems against Data Integrity Attacks: A Detection-Isolation-Mitigation Approach”。报告中提出了一个系统的攻击抵制框架,通过挖掘有主动水印信号下测量与控制指令之间的内在联系,从而保护信息物理系统免受数据完整性攻击。

上海交通大学方崇荣助理教授作报告
最后一位报告人是南方科技大学何力副教授,报告题目为“ 激光点云回环检测研究”。报告从点云全局描述符设计、城市级大场景描述符快速检测及匹配等方面切入,介绍紧凑的高表征能力的地点描述符、高效低维检索、快速旋转对齐等工作,进一步提升激光雷达回环检测的性能。

南方科技大学何力副教授作报告
