




一、汽车驾驶的内涵
汽车驾驶本质上是对汽车运动的控制。无论是人工驾驶还是机器驾驶,驾驶的本质任务均未改变,即将汽车从位置A驶向位置B。在操作层面上,驾驶涉及油门、换档、加速、自动等操作,即对汽车运动方向和驱动力的控制。对汽车运动进行控制需要满足:以人为中心的安全舒适,其中安全是最重要的;以社会为中心的节能减排;以企业为中心的降本增效。显然,这三个要求是冲突和矛盾的。
人类驾驶员驾驶汽车,首先是依靠视觉和听觉感知周围环境,还有通过身体感知车辆的振动和加速度等车辆运动状态。因此,人类驾驶员对环境的感知并非仅仅依赖于视觉和听觉,还融合了身体对运动姿态的感知。接下来,根据感知、经验、记忆等信息理解环境,用脑完成转向、加减速、挡位等决策。最后,通过手脚执行对方向盘、制动踏板、油门踏板和换挡的操作。
因此,汽车驾驶的自动化是对人类驾驶员感知、决策、执行各功能的增强或者替代。这里,对人类驾驶员执行功能的增强和替代已经在汽车领域得到广泛应用,例如自动变速箱和自适应巡航系统。自动变速箱能够实现前向行驶时的档位操作的自主决策和执行,而自适应巡航系统能够在有限范围内自主进行加减速决策和执行。也就是说,汽车驾驶的自动化一直在进行中。
SAE(Society of Automotive Engineers)按照适用场景将自动驾驶技术分为L0-L5的等级,如图1所示。实际上,从完全人类驾驶的L0,到解放双脚的L1,以及解放双手、解放双眼、解放大脑,直至完全无人驾驶的L5,这些级别代表着对人类驾驶员感知、决策和执行功能增强或替代的程度。

图1 自动驾驶分级
二、汽车驾驶的特征
汽车驾驶的特征包括以下几个方面:首先,在运动动力学方面,汽车表现出高速、刚体、三维运动特性。例如,在转向过程中乘坐者会产生外侧倾斜感,油门踩得过猛会产生后坐感,行驶在不平路面上的垂向颠簸感。这里,一个更为重要的特征是复杂的轮地关系。汽车运动中,轮胎是汽车与地面唯一的接触面,汽车的前进依赖于轮胎力的作用。不论是燃油车还是电动车,无论其控制系统如何,轮胎力是汽车运动的终极控制量。轮胎力在x-y-z三维坐标系中有6个分量,而所有控制系统最终都通过这6个量来影响汽车的运动。
轮地关系的复杂性源于轮胎与路面之间的唯一接触面以及胎面和路面的多样性。路面有沥青、水泥、石子等不同材质,还有雨水、冰雪覆盖等情况;轮胎的材质、充气量和磨损等因素也对轮地关系有直接影响。此外,轮胎力呈现非线性特性,表现为轮胎力会饱和,即在某种程度上无法进一步增加。作为汽车运动的终极控制力,一旦达到饱和,就无法再产生有效的控制。在三维坐标系中,轮胎力饱和可以用一个锥形体来描述,投影在侧纵(y-x)向上为椭圆型状。
汽车驾驶的第二个特征表现在行驶环境即交通环境的开放性和异构性。交通环境中有不同的交通参与者,行人、摩托车、自行车和机动车等,这些不同类型的参与者使得交通环境具有开放性和异构性。另外,运行环境还受到天气条件的影响,例如雨、雪、雾等不稳定天气,这种多变的天气状况也增加了运行环境的开放性和异构性。
汽车驾驶的第三个特征表现在汽车系统层面。首先是以力矩为纽带的动力产生、传递、使用过程中的机-电-液-热反应动力学强耦合,如图2所示。不论是燃油车还是新能源汽车,动力系统先将化学能或电能转换为机械能,产生力矩。然后通过力矩传递和速度匹配,将动力传递至车轮,最终用于驱动车辆运动。如果系统还采用了能量回收技术,运动能将再次转换为电能,进而进一步加重了动力学耦合程度。
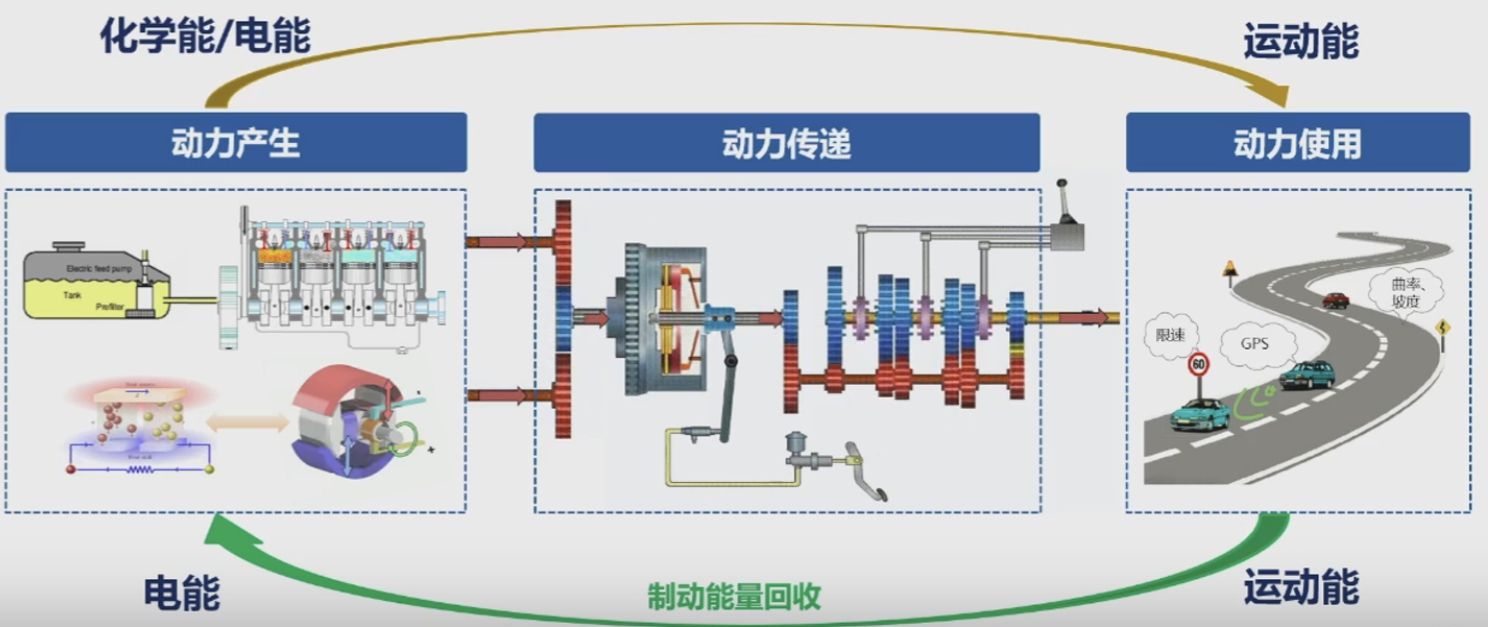
图2 汽车动力产生过程
第二个系统特征涉及人在回路中的几个方面。首先,驾驶员在回路中发挥着重要作用,他们具有多样性,通常是非职业的个体,但又需要处理高速运动的汽车驾驶问题,这是需要考虑的重要特征。其次,乘员也在回路中扮演关键角色。汽车是以人为中心的产品,必须时刻关注乘员的安全感和舒适感。第三,人机博弈是人在回路的第三个方面。车辆运动只有一个主体,但控制车辆运动却有两个主体,一个是人类驾驶员,另一个是机器电脑也就是控制系统。人类驾驶员和控制系统设计的主观意图都想使汽车运动更好、更安全、更舒适。然而,现实可能是驾驶员和控制系统在争夺驾驶权。最简单的例子是电动助力转向控制系统,如果参数调整不当,可能会产生方向盘“打手”现象。
另外一个系统特征是系统嵌套。汽车系统包括动力系统和运动系统。动力系统包括发动机系统和变速箱系统,而发动机系统又包含气路、油路、点火系统和后处理系统等;运动系统中ABS,ESC、转向系统也有类似的嵌套结构。在构建自动驾驶系统时,动力控制和运动控制又都成为了执行控制系统。这看似简单,实际上是一个层层嵌套的系统结构。最外层是自动驾驶系统,通过相机、雷达等多模态感知信息构成反馈。
三、智能时代新技术
智能时代的技术特征:泛在感知、数据极大丰富,使得预测更准确;泛在计算、算力显著提升,使得计算更快速,如图3所示。比如,车载感知技术的不断进步使得数据量大幅增加,从而提升了车辆轨迹预测的准确性。

图3 智能感知
预测优化技术在提高数据准确性后,可以应用于预测安全、预测节能、预测减排等领域。预测安全的动因来源于2015年一次特大交通事故,由于车辆速度过快,在上坡道时无法完成需要的转向,造成了重大人员伤亡的交通事故。基于道路的坡度、曲率数据,运用预测优化技术,能够准确预测车辆的运动轨迹,从而及时对车辆进行主动转向或制动,惨剧或可以避免。
在国家自然科学基金委员会重大项目等支持下,围绕极限工况下汽车主动安全系统的建模、侧纵垂运动一体化协同控制与测试评价展开研究。在这项工作中,我们考虑了不同车型不同驱动构型的应用场景,使得系统技术的拓展应用更加方便灵活。从控制架构优化、零动态失稳分析、稳定边界描述,到一体化协同控制算法,全部技术自主可控。最后,在国家授牌测试场进行实车极限工况验证,对控制系统及其算法完成了超过六轮次的迭代优化,通过释放白盒代码,支撑多家自主品牌车企实现了先进技术的自主与超越。
我们团队在汽车智能技术方面的工作涵盖多个方面,如图4所示。首先是人机智能增强,包括机器对人类驾驶员的增强以及人对机器的增强,以期提升自动驾驶汽车的智能水平,实现机器驾驶与人类偏好“对齐”。其次,探索深度学习智能驾驶算法的可解释性,确保驾驶决策的可靠性和安全性,以及评价不同等级自动驾驶汽车的驾驶智能度。最后,针对自动驾驶测评难题,创新了耦合多要素极限特性的实物在环高可信推演技术,自主研制了“软件在环-硬件在环-单车在环-多车在环-实车在环”全链测试工具。这些研究旨在推进智能驾驶技术的发展和安全应用。
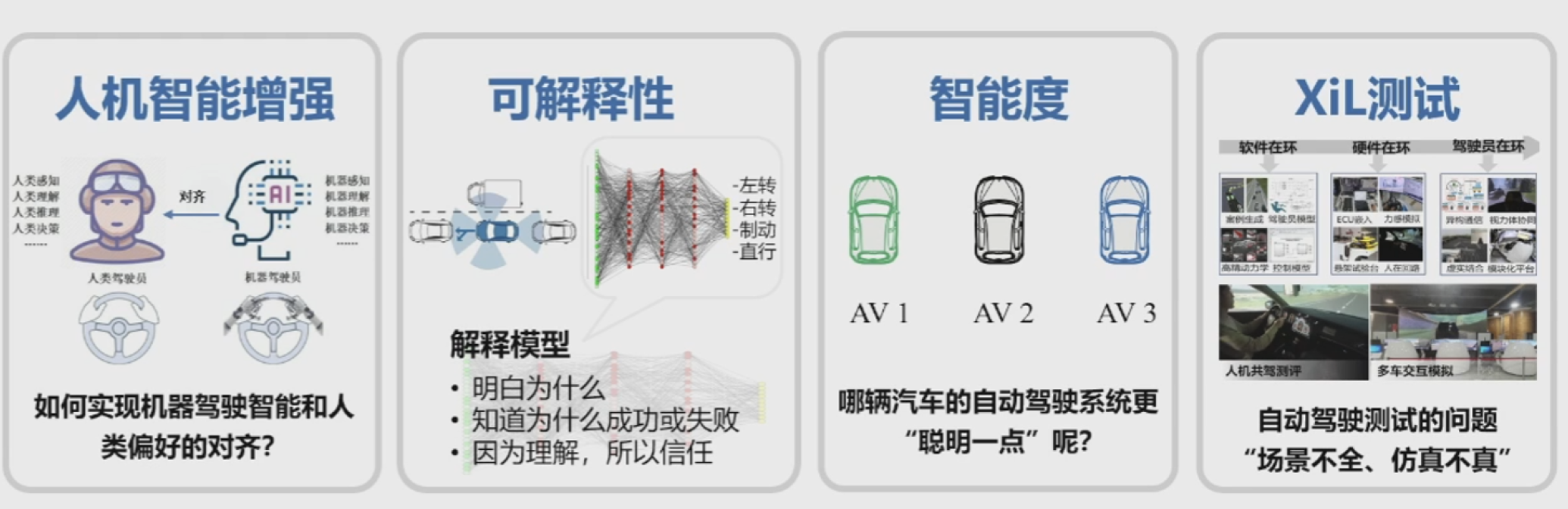
图4 汽车智能技术
对自动驾驶而言,缺乏可解释性导致决策难以理解,进而引发消费者和使用者的不信任。在解释机器学习模型时,使用线性模型是最简单的方法,因为其具有可解释性,但其中最困难的部分是设计归因函数。经济学中,Shapley值可以用来衡量个体的贡献,但将其应用于解释机器学习算法时面临一个基值问题,即如何确定基准值。为此,我们提出了一个TP基值的方案,计算个体Shapley值,保证获胜团队贡献始终得到正面评价。最后,我们以DQN跟车决策模型为例,验证所提出的可解释性方法的有效性。
四、要点回顾与展望
汽车驾驶的本质是对汽车多自由度运动的控制,需要平衡以人为中心的安全舒适、以社会为中心的节能减排,以及以企业为中心的降本增效等三个相互冲突的要求。驾驶的自动化是对人类驾驶员感知、决策和执行等各项功能的增强或者替代。汽车驾驶系统的特征包括高速、三维运动、复杂轮地关系,开放、异构、多变运行环境,机、电、液、热、反应动力学强耦合,人在回路,以及系统嵌套结构等。
数智时代,更多信息更快计算推动先进算法的车载应用,创造更多的新系统和新功能,赋能汽车社会更安全、更节能、更环保、更舒适。
